The AUV Sirius was surveying sites east of Broughton Island on the NSW coast near Port Stephens as part of repeat IMOS AUV surveys. This area of the coast is well known as a Great White Shark nursery. This video shows a snippet of video taken from a forward looking camera on the vehicle which captured a juvenile shark having a look at the vehicle.
All posts by Stefan Williams
Postdoctoral research position available
We have recently advertised a postdoctoral research position in the area of computational imaging applied to challenging underwater scenarios. Have a look at the link on the University of Sydney site for details on how to apply.
AUV Sirius at Bateman’s Bay
The AUV Sirius has completed surveys offshore of Bateman’s Bay as part of bi-annual surveys associated with the IMOS AUV Facility program. The surveys targeted reefs surveyed in 2010 and 2012 and will help scientists from the NSW Department of Primary Industries, the University of Sydney and the University of New South Wales in tracking changes in kelp dominated benthic habitats at these sites.
Return to Antikythera – Wrapping Up
After 10 days in the field, we have now packed up the AUV and associated equipment and are on our way back to Sydney. We were able to deliver a detailed, 3D map of the wreck site generated using some 42,000 images collected by the AUV Sirius during two dives. This model will now be used by the archaeological team to plan their excavation. Stay tuned to the project website for more details and on-going activity relating to the excavation. We’ll feature the resulting maps once they have been published.














Return to Antikythera – Day 9
The wind began to blow today and the forecast was for it to swing aroung the NE, impacting our ability to work on the site. Despite our desire to get out to the site again to tackle some of our secondary targets, the decision was made to pack up our gear and focus on processing the imagery that we had collected. The science party appear very pleased with what we have accomplished and are planning to use our site maps to help with planning of the excavation and deployment of the Exosuit next week.
Return to Antikythera – Day 8
Today we spent time on the main wreck site, re-imaging the site at a higher altitude to ensure that there are minimal holes in the final 3D models. The site has a number of very rugose areas, including large boulders and the base of a cliff. The vehicle completed its missions sucessfully at the main site before starting a synoptic mission over the secondary wreck site identified in 2012. This site was very steep, with a vertical profile in excess of over 20m across the site 25m wide survey area. The vehicle managed this terrain and completed a number of passes over the site before we brought it to the surface for recovery.
Return to Antikythera – Day 7
We managed to process all of the data collected yesterday. Despite some of the setbacks, the data looked good and we were able to share it with the science party. This allowed us to tweak the plans for the imaging survey and to prioritise targets for the day.
We started the day with the imaging survey of the main wreck site. Coincidentally some of the deep divers were in the area and caught the vehicle as it began its survey. Phil Short managed to capture this video of the vehicle starting its mission.
Following the successful completion of the imaging survey we conducted a multibeam survey of a secondary wreck site followed by an imaging run over a target identified in the multibeam data collected further offshore.
Return to Antikythera – Day 6
Today was our first day out on the wreck. We had planned our missions based on bathymetric models collected during last year’s expedition. The wreck is on a terrace at the base of a cliff with a steep 7m underwater cliff on the outside edge of the site. We completed a multibeam survey over the entire site to provide context for subsequent dives.
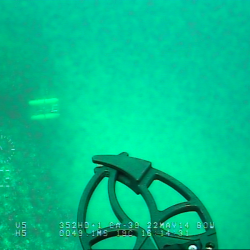
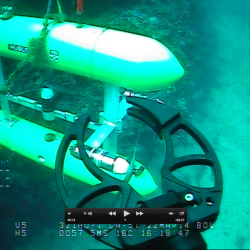
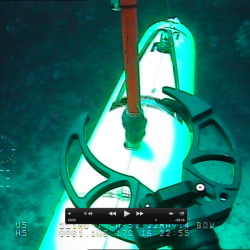
We then commenced an imaging run at 2m altitude. The vehicle descended and began heading across the site. We had planned for it turn before the underwater cliff but the vehicle travelled off the cliff, following the base before turning to make its way back up to the wreck site. USBL tracking from the surface suggest that it might have been stuck. The vehicle was aborted but remained at the base of the cliff. The decision was made to deploy the ROV to effect a recovery. The following images capture some of the moments leading to the recovery of the vehicle. It was stuck under a fishing line draped across the cliff.



Following those anxious moments we decided to continue the survey. Part way through the imaging run the camera system appeared to stop capturing images. The vehicle returned to the surface and we opted to conduct multibeam surveys at two other sites of interest further offshore before returning to the harbour to investigate the issue further.
Return to Antikythera – Day 5
With all of our calibrations completed, we were looking forward to the opportunity to get out onto the wreck today. Unfortunately, the wind came up and MV Glaros moved to a sheltered site on the SW of Antikythera last night. We anchored up out of the wind and swell and enjoyed a beautiful day in a small cove surrounded by cliffs. We took the opportunity to assemble our Iver AUV but discovered an issue with one of the electronics boards that will need to be replaced.
MV Poseidon joined us in the afternoon after battling through the swell and we deployed Sirius to conduct the dives planned for the wreck site to verify the encoding.





Return to Antikythera
We are currently in Antikythera, Greece preparing to survey a wreck from around 100BC. The wreck contained a wealth of artefacts, including an intricate mechanism designed to predict celestial and planetary motion. This represents one of the earliest examples of an analog computer. The team will be using AUVs, ROVs, divers and a deep-diving suit to document the site and conduct excavations. See more details at the official project site here:
Stay tuned for updates as we begin deploying our systems!




