Focus on a single plane is a linear process that can be carried out by a conventional lens. Focus on a volume is also a linear process, but to our knowledge there is no optical system that can perform volumetric focus. Planar focus creates a single plane of sharp focus within a scene, and ”blurs” elements as you move away from that plane — the larger the aperture, the sharper the falloff. Volumetric focus puts a ”range” of depths in focus, and blurs elements as you move away from the focal volume. The rate at which the blur increases is a tunable filter parameter, with an upper bound determined by the light field camera’s aperture.
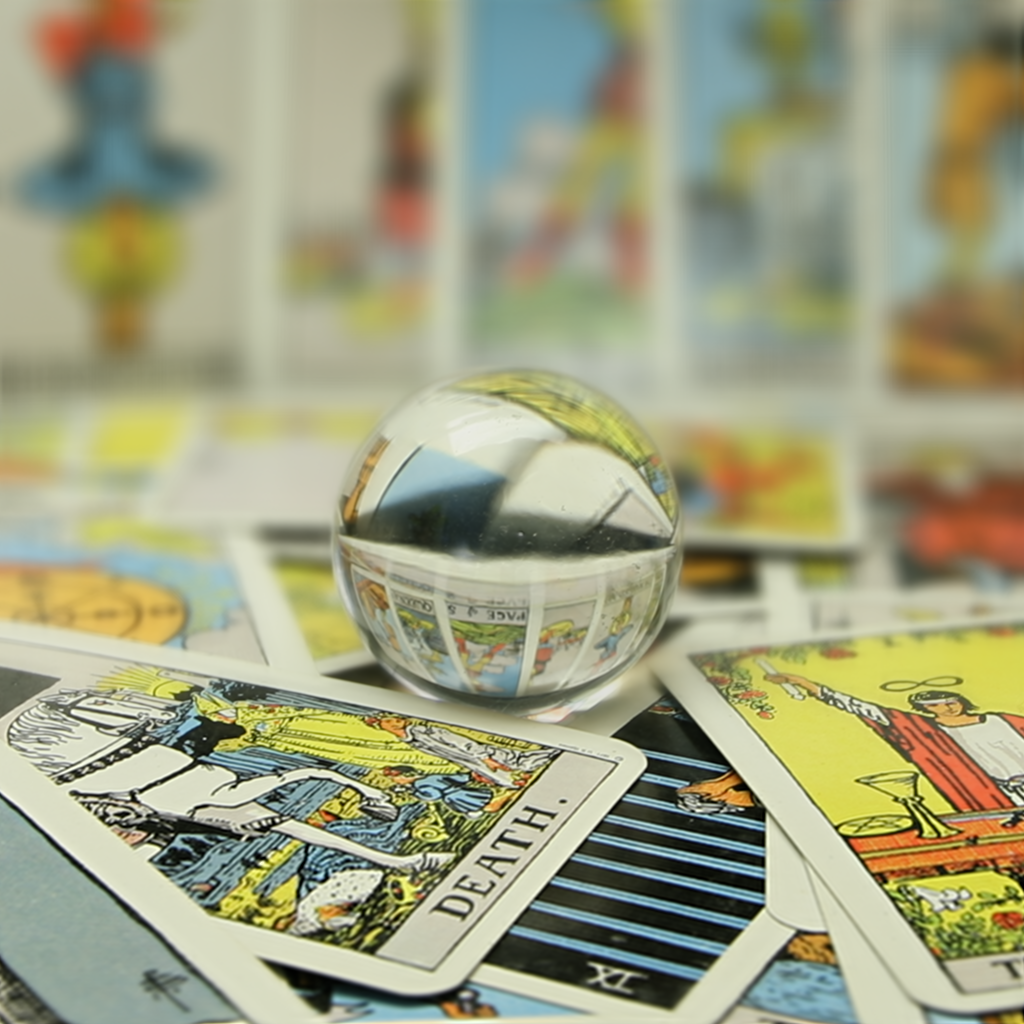
2D slice of the input light field, care of the Stanford Light Field ArchiveFocus on a single plane — this could be accomplished by any conventional camera, provided its aperture was adequately largeFocus on a volume containing the front part of the scene — note how focus drops off sharply at the back end of the volume. To our knowledge, there is no physical lens capable of this kind of volumetric focus.Focus on a volume containing the back of the scene — again, note the sharp change in focus at the volume boundary; note also the speckles on the back of the crystal ball.This figure demonstrates how more complex shapes can be constructed as the superposition of hyperfans. Here a volume coincident with the crystal ball is left as a stopband, and the rest of the scene is kept in focus. This single filter was constructed as the superposition of two hyperfan filters in the frequency domain.
All of the above example are single-step linear filters, implemented as a spatial convolution between the 4D input light field and a real-valued 4D impulse response. The output in each case is a 4D light field — shown here are 2D slices.
Denoising
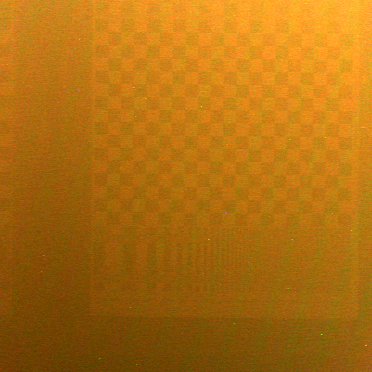
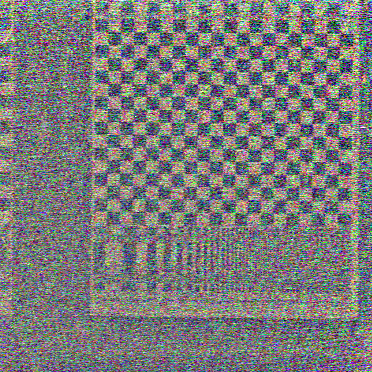
Here are some examples demonstrating a hyperfan filter cutting through murky water. In the below, the filter is implemented directly in the frequency domain.
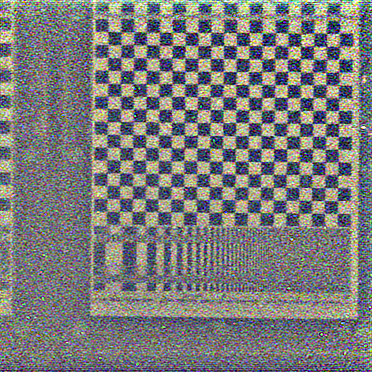
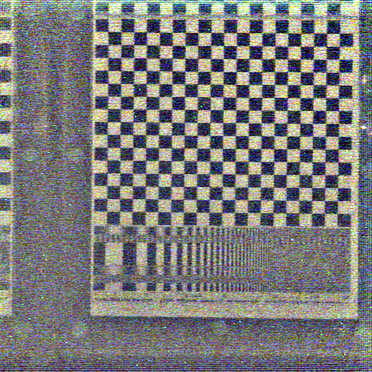
2D slice of the input light field: a tank of murky water between the camera and a checkerboard pattern. Backscatter dominates the image: the orange glow is due to the dim halogen bulb illuminating the scene.The same scene after removing the backscatter and stretching contrast. As in low light, contrast is limited, and so noise is the ultimate limiting factor in correcting these sorts of images.2D slice of the hyperfan-filtered scene. The depth of field of this image is wide, including most of the space between the camera and the checkerboard. The noise has been significantly attenuated, without degrading the sharpness of the checkerboard.Similar to the previous hyperfan output, but with a narrower depth of field centered on the checkerboard. Here we see how depth of field is traded off for noise performance, similar to a conventional camera, except that here the in-focus elements are described by a tuneable volume instead of a plane.
Please refer to our SPIE 2013 paper for further information:
D. G. Dansereau, D. L. Bongiorno, O. Pizarro, and S. B. Williams, “Light field image denoising using a linear 4D frequency-hyperfan all-in-focus filter,” in Proceedings SPIE Computational Imaging XI, Feb 2013. Available here.