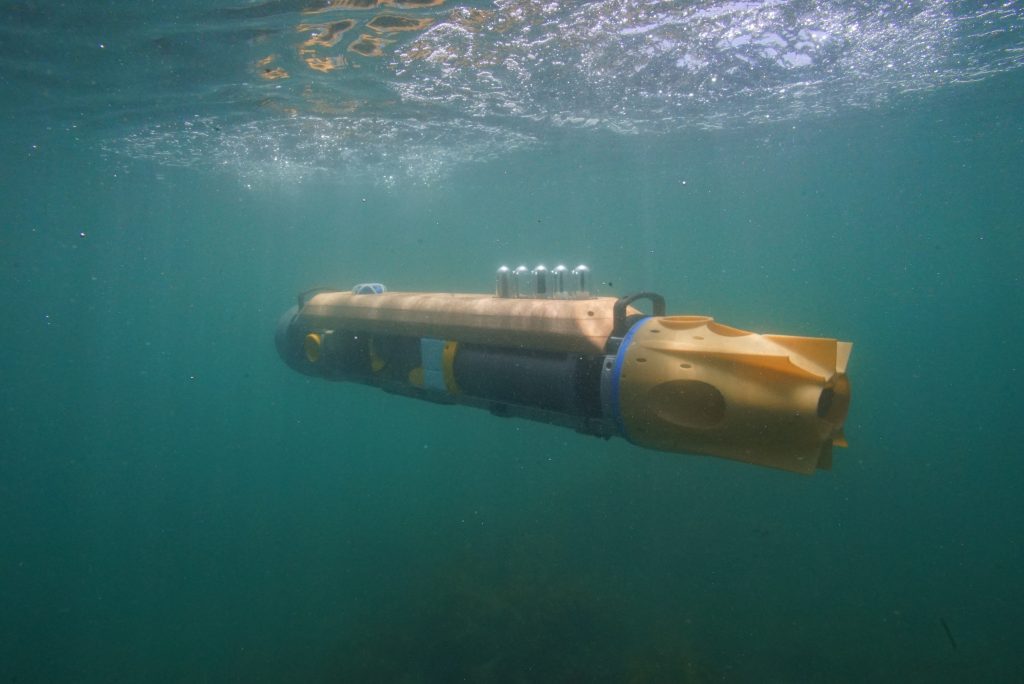
The Seeker AUV is our newest benthic-imaging platform. It is a two-man portable, hover-capable AUV that collects high-quality, well-lit stereo imagery of the seafloor. It fuses an array of navigation sensors including Doppler Velocity Log (DVL), Ultra-Short BaseLine (USBL) transponder and an Inertial Measurement Unit (IMU), enabling it to accurately localise underwater. The forward-looking obstacle avoidance sonar and camera allow it to avoid obstacles and navigate complex terrain. The vehicles are designed to be deployed and recovered from a small boat, via a custom Launch and Recovery System (LRS) or by hand-recovery. It has hot-swappable battery packs, maximising the survey time per day. It is a modular platform allowing quick and cost-effective sparing. The vehicle can be tracked and commanded from the surface using the USBL system.
Capabilities:
- Operating depth: 300m
- Max Speed: 1 m/s
- Mass: 50kg
- Endurance: 6 hours of bottom time
- Batteries: 2x500Wh
- Underwater Communications: USBL
- Surface Communications: Radio 900MHz, WiFi, LoRA, Iridium
- Cameras: Stereo 8MP