We are currently on a cruise deploying multiple, coordinated autonomous systems at Scott Reef on the Australian North West Shelf, approximately 400km north of Broome, WA. These deployments are seeking advance two related and complementary threads in oceanographic robotics:
- robotic force-multiplication of research vessels using coordinated and complementary vehicles, and
- untended, precisely navigated groups of small long-range benthic imaging robots.
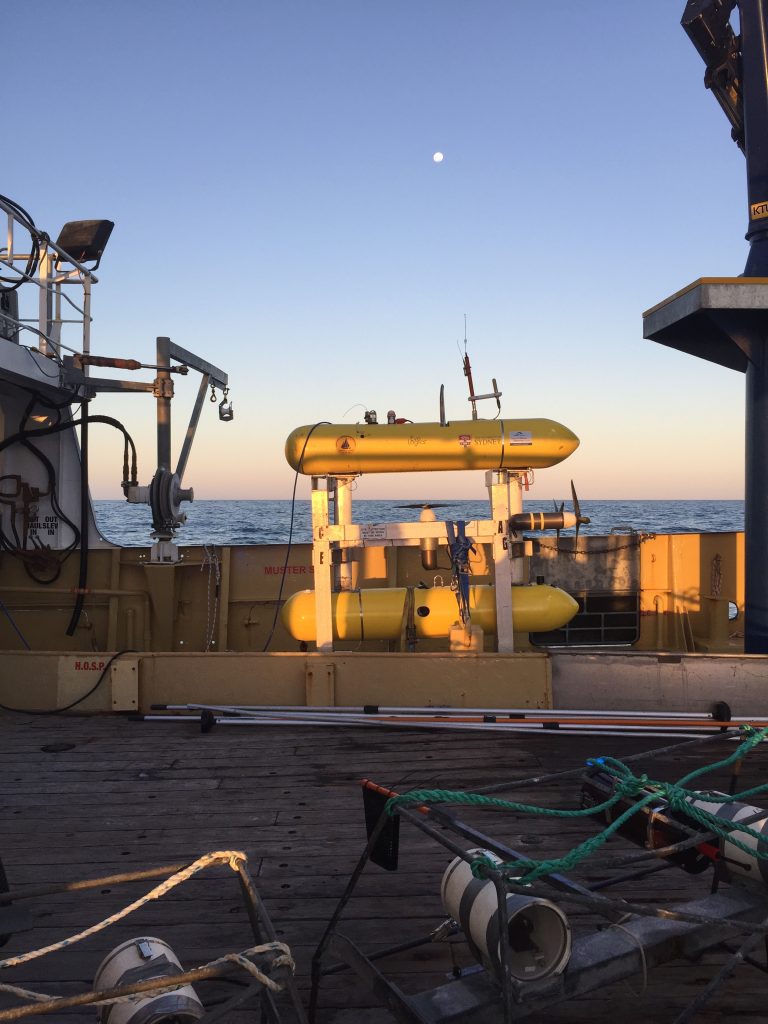
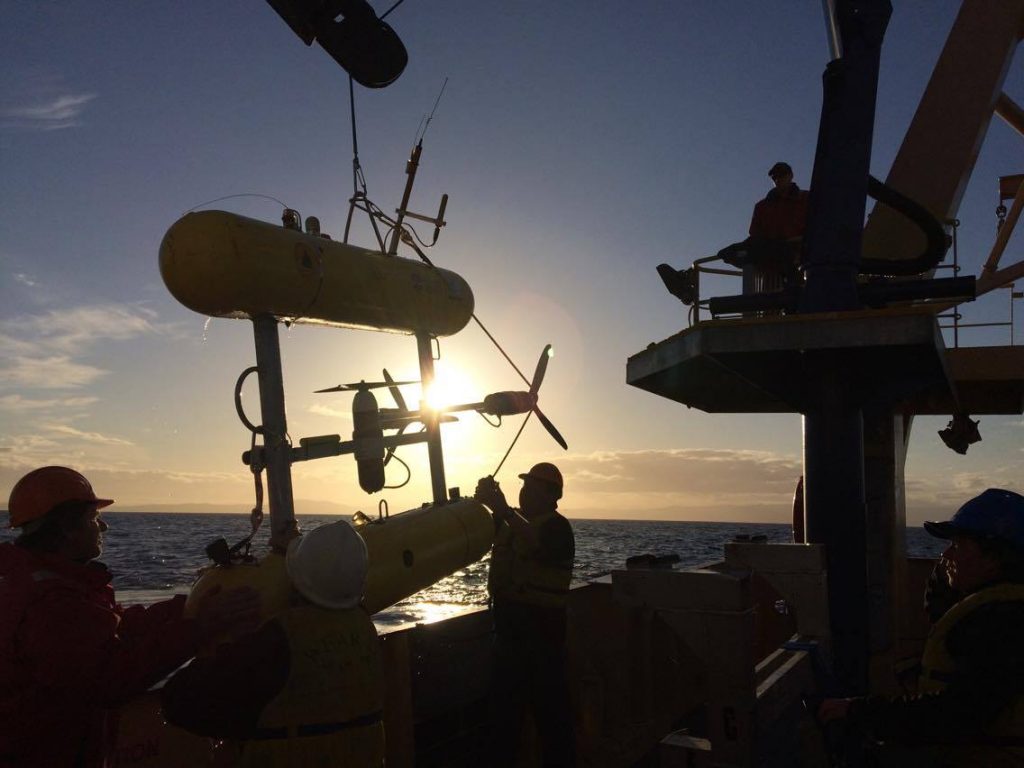
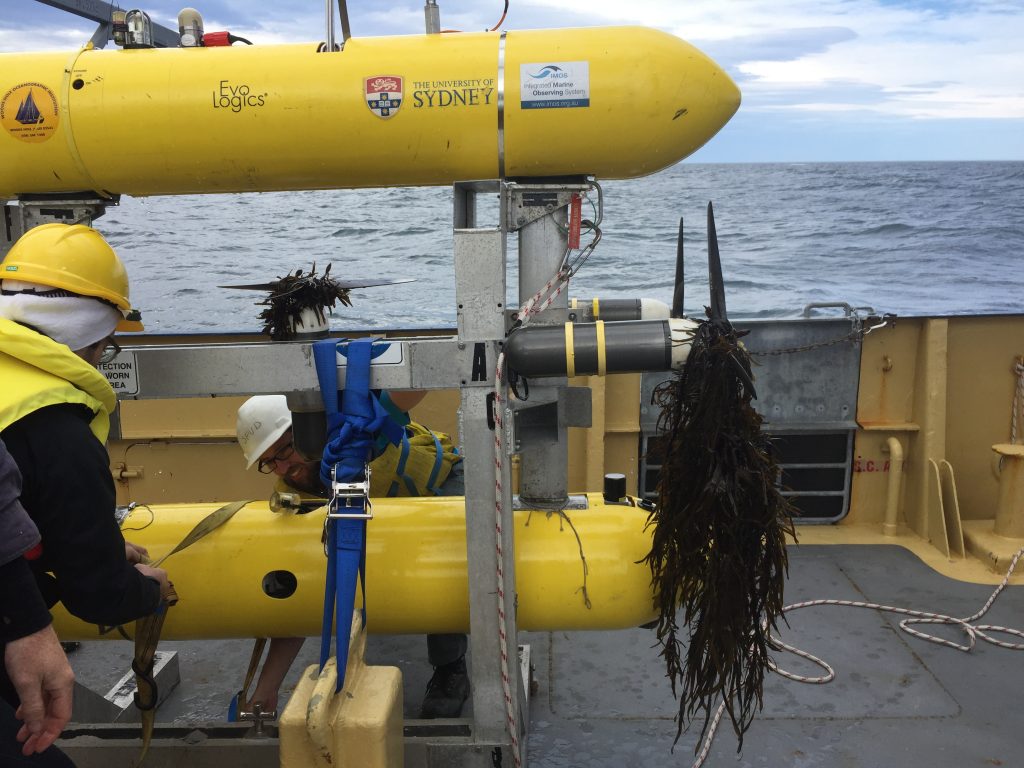
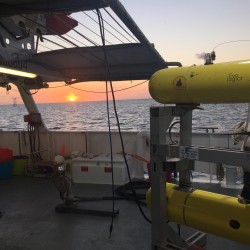
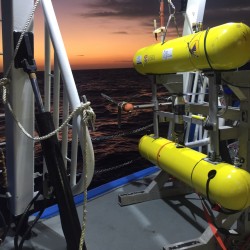
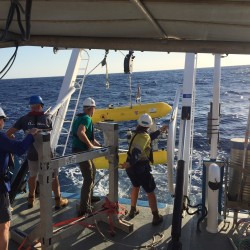
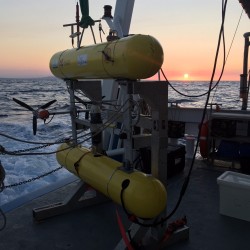
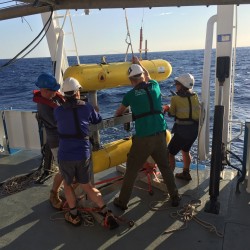
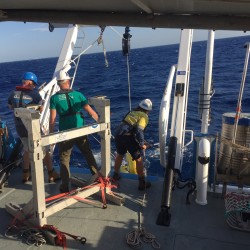
This expedition has brought together a group of international PIs who have significant experience and resources in marine robotics field operations as well as a decade-long history of productive collaboration. Time on the Schmidt Ocean Institution vessel R/V Falkor has provided the opportunity to leverage our independent research programs into a robotic seafloor observing system of unprecedented scale and heterogeneity. The fielded system comprise autonomous underwater vehicles (AUVs), a glider, a Lagrangian imaging float and an autonomous surface vessels (ASV), all working collectively to deliver a comprehensive synoptic view of the benthos, seafloor structure, and relevant local oceanography.